Lekcja zaczyna się od dwóch równoważnych matematycznych opisów pomiarów:
Ogólne pomiary można opisać za pomocą kolekcji macierzy, po jednej dla każdego wyniku pomiaru, w sposób, który uogólnia opis pomiarów projektywnych.
Ogólne pomiary można opisać jako kanały, których wyjściami są zawsze stany klasyczne (reprezentowane przez diagonalne macierze gęstości).
Ograniczymy naszą uwagę do pomiarów mających skończenie wiele możliwych wyników.
Chociaż można zdefiniować pomiary z nieskończenie wieloma możliwymi wynikami, są one znacznie rzadziej spotykane w kontekście obliczeń i przetwarzania informacji, a także wymagają dodatkowej matematyki (mianowicie teorii miary), aby zostały odpowiednio sformalizowane.
Początkowo skupimy się na tak zwanych pomiarach destrukcyjnych, w których wynikiem pomiaru jest wyłącznie klasyczny wynik — bez specyfikacji stanu kwantowego mierzonego układu po pomiarze.
Intuicyjnie można sobie wyobrazić, że taki pomiar niszczy sam układ kwantowy lub że układ jest natychmiast odrzucany po wykonaniu pomiaru.
W dalszej części lekcji rozszerzymy nasze spojrzenie i rozważymy pomiary niedestrukcyjne, w których występuje zarówno klasyczny wynik pomiaru, jak i stan kwantowy mierzonego układu po pomiarze.
Załóżmy, że X jest układem, który ma zostać zmierzony, i dla uproszczenia przyjmijmy, że zbiorem stanów klasycznych X jest {0,…,n−1} dla pewnej dodatniej liczby całkowitej n, tak że macierze gęstości reprezentujące stany kwantowe X są macierzami n×n.
W rzeczywistości nie będziemy mieli dużej potrzeby odwoływać się do stanów klasycznych X, ale wygodnie będzie odwoływać się do n, liczby stanów klasycznych X.
Założymy również, że możliwymi wynikami pomiaru są liczby całkowite 0,…,m−1 dla pewnej dodatniej liczby całkowitej m.
Zauważmy, że używamy tych nazw tylko po to, aby uprościć sprawy;
łatwo jest uogólnić wszystko, co następuje, na inne skończone zbiory stanów klasycznych i wyników pomiarów, zmieniając ich nazwy według uznania.
Przypomnijmy, że pomiar projektywny opisuje się za pomocą kolekcji macierzy projekcji sumujących się do macierzy identyczności.
Symbolicznie,
{Π0,…,Πm−1}
opisuje pomiar projektywny X, jeśli każde Πa jest macierzą projekcji n×n i spełniony jest następujący warunek.
Π0+⋯+Πm−1=IX
Gdy taki pomiar jest wykonywany na układzie X, podczas gdy znajduje się on w stanie opisanym przez pewien kwantowy wektor stanu ∣ψ⟩, każdy wynik a jest otrzymywany z prawdopodobieństwem równym ∥Πa∣ψ⟩∥2.
Mamy również, że stan X po pomiarze otrzymuje się przez normalizację wektora Πa∣ψ⟩, ale na razie pomijamy stan po pomiarze.
Jeśli stan X jest opisany macierzą gęstości ρ zamiast kwantowym wektorem stanu ∣ψ⟩, to alternatywnie możemy wyrazić prawdopodobieństwo uzyskania wyniku a jako Tr(Πaρ).
Jeśli ρ=∣ψ⟩⟨ψ∣ jest stanem czystym, to oba wyrażenia są równe:
Tutaj używamy cyklicznej własności śladu dla drugiej równości, a dla trzeciej równości używamy faktu, że każde Πa jest macierzą projekcji, a zatem spełnia Πa2=Πa.
Ogólnie, jeśli ρ jest kombinacją wypukłą
ρ=k=0∑N−1pk∣ψk⟩⟨ψk∣
stanów czystych, to wyrażenie Tr(Πaρ) pokrywa się ze średnim prawdopodobieństwem wyniku a, dzięki temu, że wyrażenie to jest liniowe w ρ.
Matematyczny opis pomiarów ogólnych uzyskuje się przez rozluźnienie definicji pomiarów projektywnych.
Konkretnie, dopuszczamy, aby macierze w kolekcji opisującej pomiar były dowolnymi macierzami dodatnio półokreślonymi, a nie projekcjami.
(Projekcje są zawsze dodatnio półokreślone; alternatywnie można je zdefiniować jako macierze dodatnio półokreślone, których wszystkie wartości własne są równe 0 lub 1.)
W szczególności ogólny pomiar układu X mający wyniki 0,…,m−1 jest określony przez kolekcję macierzy dodatnio półokreślonych {P0,…,Pm−1}, których wiersze i kolumny odpowiadają stanom klasycznym X i które spełniają warunek
P0+⋯+Pm−1=IX.
Jeśli układ X jest mierzony, gdy znajduje się w stanie opisanym przez macierz gęstości ρ, to każdy wynik
a∈{0,…,m−1} pojawia się z prawdopodobieństwem Tr(Paρ).
Jak naturalnie musimy wymagać, wektor prawdopodobieństw wyników
(Tr(P0ρ),…,Tr(Pm−1ρ))
pomiaru ogólnego zawsze tworzy wektor prawdopodobieństw, dla dowolnego wyboru macierzy gęstości ρ.
Poniższe dwie obserwacje pokazują, że tak jest w istocie.
Każda wartość Tr(Paρ) musi być nieujemna, dzięki temu, że ślad iloczynu dowolnych dwóch macierzy dodatnio półokreślonych jest zawsze nieujemny:
Q,R≥0⇒Tr(QR)≥0.
Jednym ze sposobów uzasadnienia tego faktu jest użycie dekompozycji spektralnych Q i R wraz z cykliczną własnością śladu, aby wyrazić ślad iloczynu QR jako sumę nieujemnych liczb rzeczywistych, która zatem musi być nieujemna.
Warunek P0+⋯+Pm−1=IX wraz z liniowością śladu zapewnia, że prawdopodobieństwa sumują się do 1.
Załóżmy, że X jest kubitem, i zdefiniujmy dwie macierze w następujący sposób.
P0=(32313131)P1=(31−31−3132)
Obie są dodatnio półokreślone: są hermitowskie, a w obu przypadkach wartości własne to 1/2±5/6, które są dodatnie.
Mamy również, że P0+P1=I, a zatem {P0,P1} opisuje pomiar.
Jeśli stan X jest opisany przez macierz gęstości ρ i wykonamy ten pomiar, to prawdopodobieństwo uzyskania wyniku 0 wynosi Tr(P0ρ), a prawdopodobieństwo uzyskania wyniku 1 wynosi
Tr(P1ρ).
Na przykład, jeśli ρ=∣+⟩⟨+∣, to prawdopodobieństwa dwóch wyników 0 i 1 są następujące.
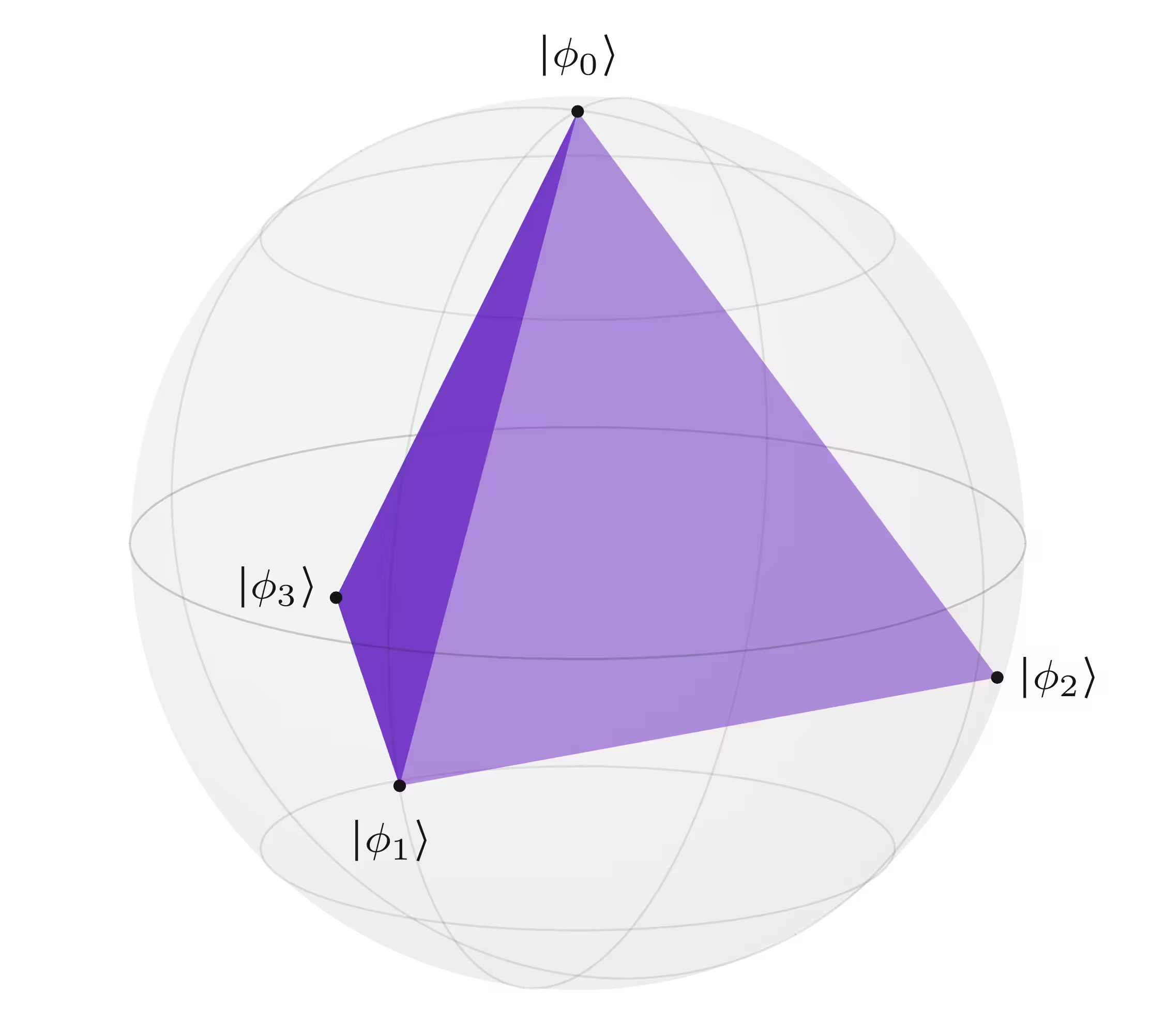
Te cztery stany są idealnie rozproszone na sferze Blocha, przy czym każdy z nich jest równoodległy od pozostałych trzech, a kąty między dowolnymi dwoma z nich są zawsze takie same.
Zdefiniujmy teraz pomiar {P0,P1,P2,P3} kubitu, przyjmując Pa w następujący sposób dla każdego a=0,…,3.
Pa=2∣ϕa⟩⟨ϕa∣
Możemy zweryfikować, że jest to prawidłowy pomiar w następujący sposób.
Każde Pa jest ewidentnie dodatnio półokreślone, będąc stanem czystym podzielonym przez jedną drugą.
To znaczy, każde z nich jest macierzą hermitowską i ma jedną wartość własną równą 1/2, a wszystkie pozostałe wartości własne są zerowe.
Suma tych macierzy jest macierzą jednostkową: P0+P1+P2+P3=I.
Wyrażenia tych macierzy jako kombinacji liniowych macierzy Pauliego sprawia, że jest to łatwe do zweryfikowania.
Drugim sposobem opisu pomiarów w kategoriach matematycznych jest przedstawienie ich jako kanałów.
Informację klasyczną można postrzegać jako szczególny przypadek informacji kwantowej, o ile utożsamimy stany probabilistyczne z diagonalnymi macierzami gęstości.
W ujęciu operacyjnym możemy zatem myśleć o pomiarach jako o kanałach, których wejściami są macierze opisujące stany mierzonego układu, a wyjściami są diagonalne macierze gęstości opisujące otrzymany rozkład wyników pomiaru.
Wkrótce zobaczymy, że każdy kanał mający tę własność można zawsze zapisać w prostej, kanonicznej postaci, która bezpośrednio wiąże się z opisem pomiarów jako kolekcji dodatnio półokreślonych macierzy.
Odwrotnie, dla dowolnego pomiaru zadanego jako kolekcja macierzy zawsze istnieje poprawny kanał o własności diagonalnego wyjścia, który opisuje dany pomiar w sposób zasugerowany w poprzednim akapicie.
Łącząc te obserwacje, stwierdzamy, że oba opisy ogólnych pomiarów są równoważne.
Zanim pójdziemy dalej, sprecyzujmy, czym jest pomiar, jak postrzegamy go jako kanał oraz jakie założenia dotyczące niego przyjmujemy.
Tak jak poprzednio, założymy, że X jest układem, który ma być mierzony, a możliwymi wynikami pomiaru są liczby całkowite 0,…,m−1 dla pewnej dodatniej liczby całkowitej m.
Niech Y będzie układem przechowującym wyniki pomiaru, tak że jego klasyczny zbiór stanów to {0,…,m−1}, a pomiar reprezentujemy jako kanał o nazwie Φ z X do Y.
Zakładamy, że Y jest klasyczny — co oznacza, że niezależnie od tego, od jakiego stanu X zaczniemy, stan Y, który otrzymamy, jest reprezentowany przez diagonalną macierz gęstości.
Fakt, że wyjście Φ jest zawsze diagonalne, możemy wyrazić w kategoriach matematycznych w następujący sposób.
Najpierw zdefiniujmy całkowicie defazujący kanał kwantowy Δm na Y.
Δm(σ)=a=0∑m−1⟨a∣σ∣a⟩∣a⟩⟨a∣
Kanał ten jest analogiczny do całkowicie defazującego kanału kwantowego kubitu Δ z poprzedniej lekcji.
Jako odwzorowanie liniowe zeruje wszystkie pozadiagonalne elementy macierzy wejściowej, a elementy diagonalne pozostawia bez zmian.
A teraz prostym sposobem wyrażenia tego, że dana macierz gęstości σ jest diagonalna, jest równanie
σ=Δm(σ).
Słowami: wyzerowanie wszystkich pozadiagonalnych elementów macierzy gęstości nie ma żadnego efektu wtedy i tylko wtedy, gdy wszystkie pozadiagonalne elementy były zerowe już wcześniej.
Kanał Φ spełnia zatem nasze założenie — że Y jest klasyczny — wtedy i tylko wtedy, gdy
Φ(ρ)=Δm(Φ(ρ))
dla każdej macierzy gęstości ρ reprezentującej stan X.
Zatem dla tych samych macierzy P0,…,Pm−1 możemy wyrazić kanał Φ następująco.
Φ(ρ)=a=0∑m−1Tr(Paρ)∣a⟩⟨a∣
Wyrażenie to jest zgodne z naszym opisem ogólnych pomiarów w kategoriach macierzy, ponieważ widzimy, że każdy wynik pomiaru pojawia się z prawdopodobieństwem Tr(Paρ).
Zauważmy teraz, że dwie własności wymagane od zbioru macierzy {P0,…,Pm−1} do opisu ogólnego pomiaru są istotnie spełnione.
Pierwsza własność polega na tym, że wszystkie one są macierzami dodatnio półokreślonymi.
Jednym ze sposobów, aby to zobaczyć, jest zauważenie, że dla każdego wektora ∣ψ⟩ mającego elementy w odpowiedniości z klasycznym stanem X mamy
Zweryfikujmy teraz, że dla dowolnego zbioru {P0,…,Pm−1} macierzy dodatnio półokreślonych spełniających P0+⋯+Pm−1=IX, odwzorowanie zdefiniowane jako
Φ(ρ)=a=0∑m−1Tr(Paρ)∣a⟩⟨a∣
jest istotnie prawidłowym kanałem z X do Y.
Jednym ze sposobów jest obliczenie reprezentacji Choia tego odwzorowania.
Transpozycja każdej Pa jest wprowadzona w trzeciej równości, ponieważ
⟨c∣Pa∣b⟩=⟨b∣PaT∣c⟩.
Pozwala to, aby pojawiły się wyrażenia ∣b⟩⟨b∣ oraz ∣c⟩⟨c∣, które upraszczają się do macierzy jednostkowej po zsumowaniu odpowiednio po b i c.
Z założenia, że P0,…,Pm−1 są dodatnio półokreślone, to samo dotyczy P0T,…,Pm−1T.
W szczególności transponowanie macierzy hermitowskiej daje w wyniku inną macierz hermitowską, a wartości własne dowolnej macierzy kwadratowej i jej transpozycji są zawsze zgodne.
Stąd wynika, że J(Φ) jest dodatnio półokreślone.
Wyśladowanie układu wyjściowego Y (który jest układem po prawej stronie) daje
Załóżmy, że mamy wiele układów znajdujących się łącznie w pewnym stanie kwantowym, a na jednym z tych układów wykonywany jest ogólny pomiar.
Skutkuje to uzyskaniem jednego z wyników pomiaru, wybieranego losowo zgodnie z prawdopodobieństwami wyznaczonymi przez pomiar oraz stan układu sprzed pomiaru.
Powstały stan pozostałych układów będzie wtedy, ogólnie rzecz biorąc, zależeć od tego, który wynik pomiaru został uzyskany.
Przyjrzyjmy się, jak to działa dla pary układów (X,Z), gdy układ X jest mierzony.
(Układ po prawej nazywamy Z, ponieważ Y weźmiemy jako układ reprezentujący klasyczne wyjście pomiaru, gdy będziemy go traktować jako kanał.)
Następnie możemy łatwo uogólnić to na sytuację, w której układy są zamienione miejscami, a także na trzy lub więcej układów.
Załóżmy, że stan (X,Z) sprzed pomiaru jest opisany macierzą gęstości ρ, którą możemy zapisać następująco.
ρ=b,c=0∑n−1∣b⟩⟨c∣⊗ρb,c
W tym wyrażeniu zakładamy, że stanami klasycznymi X są 0,…,n−1.
Założymy, że sam pomiar jest opisany zbiorem macierzy
{P0,…,Pm−1}.
Ten pomiar może być alternatywnie opisany jako kanał Φ z X do Y, gdzie Y jest nowym układem o zbiorze stanów klasycznych {0,…,m−1}.
Konkretnie działanie tego kanału można wyrazić w następujący sposób.
Rozważamy pomiar układu X, więc prawdopodobieństwa, z jakimi uzyskiwane są różne wyniki pomiaru, mogą zależeć tylko od ρX, zredukowanego stanu X.
W szczególności prawdopodobieństwo pojawienia się każdego wyniku a∈{0,…,m−1} można wyrazić na trzy równoważne sposoby.
Tr(PaρX)=Tr(PaTrZ(ρ))=Tr((Pa⊗IZ)ρ)
Pierwsze wyrażenie w naturalny sposób reprezentuje prawdopodobieństwo uzyskania wyniku a na podstawie tego, co już wiemy o pomiarach pojedynczego układu.
Aby uzyskać drugie wyrażenie, po prostu korzystamy z definicji ρX=TrZ(ρ).
Uzyskanie trzeciego wyrażenia wymaga większego namysłu — i zachęcamy uczących się, aby sami przekonali się, że jest ono prawdziwe.
Oto wskazówka: równoważność drugiego i trzeciego wyrażenia nie zależy od tego, czy ρ jest macierzą gęstości, ani od tego, czy każde Pa jest dodatnio półokreślone. Spróbuj najpierw wykazać to dla iloczynów tensorowych postaci ρ=M⊗N, a następnie wywnioskuj, że musi to być prawdą ogólnie na mocy liniowości.
Choć równoważność pierwszego i trzeciego wyrażenia w poprzednim równaniu może nie być natychmiastowa, jest ona sensowna.
Wychodząc od pomiaru na X, efektywnie definiujemy pomiar układu (X,Z), w którym po prostu odrzucamy Z i mierzymy X.
Jak każdy pomiar, ten nowy pomiar może być opisany zbiorem macierzy i nie jest zaskakujące, że jest on opisany zbiorem
Jeśli chcemy wyznaczyć nie tylko prawdopodobieństwa różnych wyników, ale także powstały stan Z warunkowany każdym wynikiem pomiaru, możemy odwołać się do opisu pomiaru za pomocą kanału.
W szczególności przyjrzyjmy się stanowi, który otrzymujemy, gdy zastosujemy Φ do X i nic nie zrobimy z Z.
takiego, jaki widzieliśmy w lekcji Macierze gęstości.
Dla każdego wyniku pomiaru a∈{0,…,m−1} mamy, z prawdopodobieństwem
p(a)=Tr((Pa⊗IZ)ρ)
że Y jest w klasycznym stanie ∣a⟩⟨a∣, a Z jest w stanie
σa=Tr((Pa⊗IZ)ρ)TrX((Pa⊗IZ)ρ).(2)
Oznacza to, że jest to macierz gęstości, którą otrzymujemy przez normalizację
TrX((Pa⊗IZ)ρ)
poprzez podzielenie jej przez jej ślad.
(Formalnie rzecz biorąc, stan σa jest zdefiniowany tylko wtedy, gdy prawdopodobieństwo p(a) jest niezerowe;
gdy p(a)=0, ten stan jest nieistotny, ponieważ odnosi się do zdarzenia dyskretnego, które zachodzi z prawdopodobieństwem zero.)
Naturalnie prawdopodobieństwa wyników są spójne z naszymi wcześniejszymi obserwacjami.
Podsumowując, oto co się dzieje, gdy pomiar {P0,…,Pm−1} jest wykonywany na X, gdy (X,Z) jest w stanie ρ.
Każdy wynik a pojawia się z prawdopodobieństwem p(a)=Tr((Pa⊗IZ)ρ).
Pod warunkiem uzyskania wyniku a, stan Z jest wówczas reprezentowany przez macierz gęstości σa pokazaną w równaniu (2), którą otrzymuje się przez normalizację TrX((Pa⊗IZ)ρ).
Możemy dostosować ten opis do innych sytuacji, takich jak odwrócenie kolejności układów lub występowanie trzech lub więcej układów.
Koncepcyjnie jest to proste, choć zapisanie wzorów może być uciążliwe.
Ogólnie, jeśli mamy r układów X1,…,Xr, stan układu złożonego (X1,…,Xr) to ρ, a pomiar {P0,…,Pm−1} jest wykonywany na Xk, dzieje się co następuje.
Każdy wynik a pojawia się z prawdopodobieństwem
p(a)=Tr((IX1⊗⋯⊗IXk−1⊗Pa⊗IXk+1⊗⋯⊗IXr)ρ).
Pod warunkiem uzyskania wyniku a, stan (X1,…,Xk−1,Xk+1,…,Xr) jest wówczas reprezentowany przez następującą macierz gęstości.